
专利示意图
一、技术领域
机器人技术领域
二、专利介绍
1.专利信息
专利类型:发明
专利权人:清华大学深圳国际研究生院
申请号:202210557056.1
发明人:梁斌、王学谦、许正哲、陈彦伯、翦卓著、肖岸星
2.专利说明书摘要
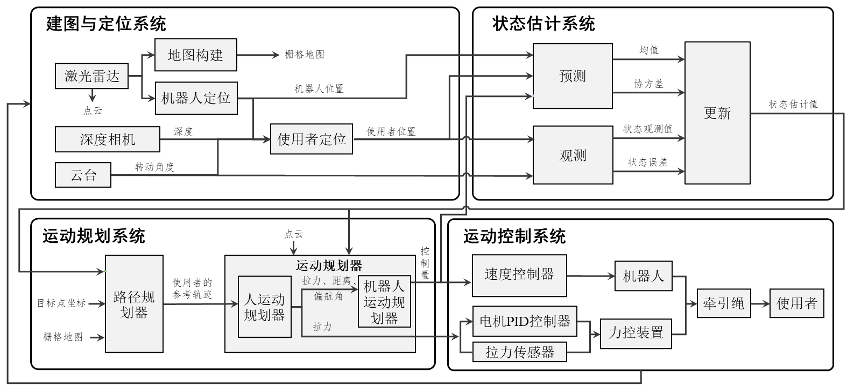
本发明公开了一种导盲机器人系统,包括建图与定位系统、状态估计系统、运动规划系统、运动控制系统,所述建图与定位系统将建立的栅格地图传送给运动规划系统,并将机器人与使用者坐标传送给状态估计系统;所述状态估计系统将机器人、使用者坐标的状态估计值传送给运动规划系统;所述运动规划系统利用栅格地图、状态估计值求解出系统的控制变量,并传递给运动控制系统。本发明能够在复杂环境下规划出一条由使用者与机器人当前位置到目标位置的实时路径,并规划作用在人身上的力和机器人的运动速度,从而将使用者安全地、舒适地牵引至目标位置。
3.创新点
(1)本发明涉及机器人领域,针对导盲机器人系统设计的问题,提出一种基于力的人机系统模型,并进行模型预测控制以实现导盲功能的方法;
(2)采用运动规划系统中的“人运动规划器”和“机器人运动规划器”的工作流程,人运功规划器可以实时规划作用在人身上的力,机器人运动规划器可以规划机器人的实时速度;
(3)运动控制系统通过控制力控装置中的电机转动以调节牵引绳长度,从而控制作用于人身上的力,精准引导使用者。
4.痛点问题
(1)现有导盲机器人使用者被牵引时缺乏舒适感;
(2)现有导盲机器人系统运动学模型不够精确;
(3)现有导盲机器人无法感知用户实时位置。
5.技术优势
(1)现有技术中,未对使用者所受拉力进行规划,使用者缺乏使用的舒适性。本发明使用弹性装置和柔性牵引绳连接,并在运动规划中对使用者所受拉力进行规划,保证了使用者的舒适性;
((2)部分现有技术不能实时感知使用者的实时位置,难以保证使用者的安全性。本发明使用深度相机等传感设备对使用者进行定位,并在运动规划中保障使用者的安全;
(3)本发明中的感知平台具有可移植性,可用于四足、轮式机器人等类型的机器人,均可实现导盲功能;
(4)本发明中建立的基于力的人机运动学模型,与现有技术相比,考虑了人所受的拉力,并以拉力的变化量、拉力的大小来判断使用者处于站立或行走状态,模型更加完善。
三、产业化信息
1.应用场景
本技术发明的导盲机器人可以在室内场景为视障者提供导盲功能:
(1)可以实现引导使用者行进至指定目标位置;
(2)可以在地铁站、机场、酒店等公共室内场所,为视障者提供引导服务。
2.商业价值
(1)对行业的价值:能够在地铁站、机场、酒店等场景内设置导盲机器人为视障者提供引导服务,为残疾人群体提供便利;
(2)导盲机器人的需求与市场规模:我国有盲人1700多万,而导盲犬少于200只。导盲机器人的潜在市场规模较大;
(3)盈利前景:导盲犬投入资金高达20余万元,但导盲机器人的成本能够控制在2万以内,具有广阔盈利前景。
3.发展规划
该技术未来可应用室外导盲,实现全场景下的导盲功能,提升导盲机器人的使用范围,为视障人群提供更大便利。
4.合作方式
面议
注:所有成果未经授权,请勿转载
联系方式:ttc@sz.tsinghua.edu.cn
